2025
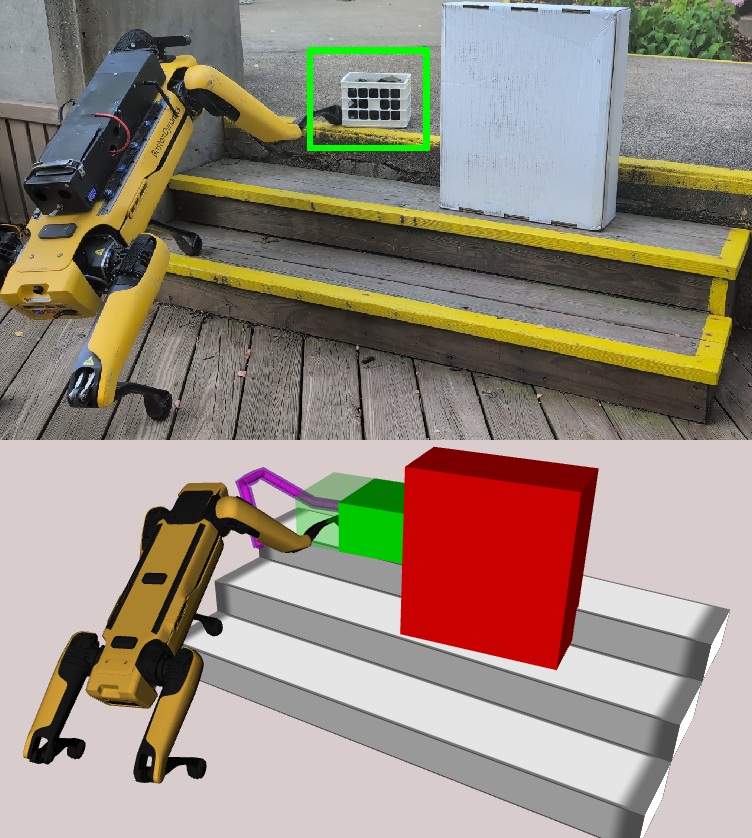
Action-Informed Estimation and Planning: Clearing Clutter on Staircases via Quadrupedal Pedipulation
Prasanna Sriganesh, Barath Satheeshkumar, Anushree Sabnis and Matthew Travers
September 25, 2025
For robots to operate autonomously in densely cluttered environments, they must reason about and potentially physically interact with obstacles to clear a path. Safely clearing a path on challenging terrain, such as a cluttered staircase, requires controlled interaction. For example, a quadrupedal robot that pushes objects out of the way with one leg while maintaining a stable stance with its three other legs. However, tightly coupled physical actions, such as one-legged pushing, create new constraints on the system that can be difficult to predict at design time. In this work, we present a new method that addresses one such constraint, wherein the object being pushed by a quadrupedal robot with one of its legs becomes occluded from the robot’s sensors during manipulation. To address this challenge, we present a tightly coupled perception-action framework that enables the robot to perceive clutter, reason about feasible push paths, and execute the clearing maneuver. Our core contribution is an interaction-aware state estimation loop that uses proprioceptive feedback regarding foot contact and leg position to predict an object’s displacement during the occlusion. This prediction guides the perception system to robustly re-detect the object after the interaction, closing the loop between action and sensing to enable accurate tracking even after partial pushes. Using this feedback allows the robot to learn from physical outcomes, reclassifying an object as immovable if a push fails due to it being too heavy. We present results of implementing our approach on a Boston Dynamics Spot robot that show our interaction-aware approach achieves higher task success rates and tracking accuracy in pushing objects on stairs compared to open-loop baselines.
@article{sriganesh2025actioninformed,
title={Action-Informed Estimation and Planning: Clearing Clutter on Staircases via Quadrupedal Pedipulation},
author={Prasanna Sriganesh and Barath Satheeshkumar and Anushree Sabnis and Matthew Travers},
journal={arXiv preprint arXiv:2509.20516},
year={2025},
}
Zongyuan Shen, Burhanuddin Shirose, Prasanna Sriganesh, Bhaskar Vundurthy, Howie Choset, and Matthew Travers
September 18, 2025
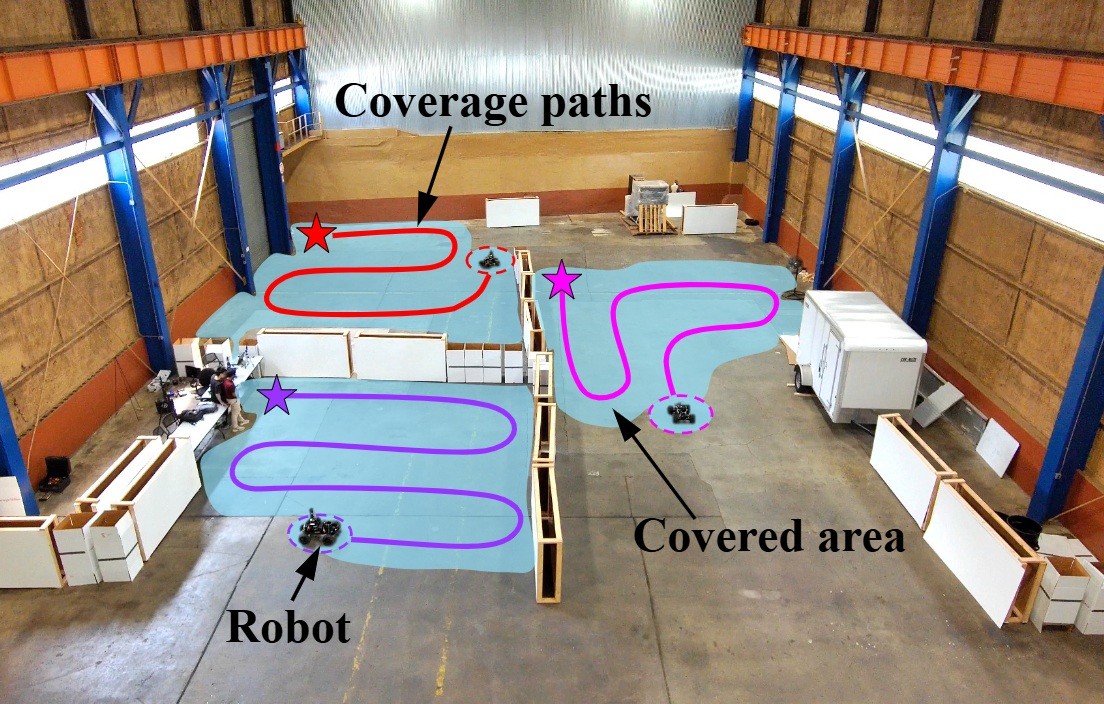
Efficient coordination of multiple robots for coverage of large, unknown environments is a significant challenge that involves minimizing the total coverage path length while reducing inter-robot conflicts. In this paper, we introduce a Multi-robot Connectivity-Aware Planner (Multi-CAP), a hierarchical coverage path planning algorithm that facilitates multi-robot coordination through a novel connectivity-aware approach. The algorithm constructs and dynamically maintains an adjacency graph that represents the environment as a set of connected subareas. Critically, we make the assumption that the environment, while unknown, is bounded. This allows for incremental refinement of the adjacency graph online to ensure its structure represents the physical layout of the space, both in observed and unobserved areas of the map as robots explore the environment. We frame the task of assigning subareas to robots as a Vehicle Routing Problem (VRP), a well-studied problem for finding optimal routes for a fleet of vehicles. This is used to compute disjoint tours that minimize redundant travel, assigning each robot a unique, non-conflicting set of subareas. Each robot then executes its assigned tour, independently adapting its coverage strategy within each subarea to minimize path length based on real-time sensor observations of the subarea. We demonstrate through simulations and multi-robot hardware experiments that Multi-CAP significantly outperforms state-of-the-art methods in key metrics, including coverage time, total path length, and path overlap ratio. Ablation studies further validate the critical role of our connectivity-aware graph and the global tour planner in achieving these performance gains.
@article{shen2025multi,
title={Multi-CAP: A Multi-Robot Connectivity-Aware Hierarchical Coverage Path Planning Algorithm for Unknown Environments},
author={Shen, Zongyuan and Shirose, Burhanuddin and Sriganesh, Prasanna and Vundurthy, Bhaskar and Choset, Howie and Travers, Matthew},
journal={arXiv preprint arXiv:2509.14941},
year={2025},
}
Charles Noren, Bhaskar Vundurthy, Namya Bagree and Matthew Travers
Published: August 17, 2025
Reliable communication networks are essential for the remote operation of automated teams of robotic agents. For unknown (no prior map) communications-deprived (no existing communication infrastructure) environments, the robotic agents must construct the network as the robots move through the terrain. We present a novel method for automated network construction tailored for mobile robotic teams that require communication with a central base station. Our key innovation is the introduction of a maximin spanning tree structure, which guarantees a minimum level of communication performance between nodes. By directly optimizing node placement based on signal-based metrics, instead of relying on geometric surrogates like distance and visibility, we also achieve significant decreases in agent utilization while maintaining coverage for the traversed area. By using the robotic agents themselves as mobile repeaters in a communication network, each robotic agent can be individually assigned to prioritize network connectivity during critical operations. Numerical simulations on common Multi-Agent Path Finding benchmarks demonstrate up to a 36% reduction in the number of required nodes compared to existing techniques. Furthermore, this work guarantees robust network connectivity in dynamic environments, outperforming strongest-neighbor approaches that are vulnerable to link disruptions. Lastly, hardware tests confirm the robustness of our method in challenging scenarios encountered in real-world deployments.
@inproceedings{noren2025max,
title={A Max-min Tree Approach to the Automated Construction of Ad Hoc Wireless Networks in Unknown Environments},
author={Noren, Charles and Vundurthy, Bhaskar and Bagree, Namya and Travers, Matthew},
booktitle={2025 IEEE 21st International Conference on Automation Science and Engineering (CASE)},
pages={2702--2709},
year={2025},
organization={IEEE}
}
A Synchronized Task Formulation for Robotic Convoy Operations
Charles Noren, Bhaskar Vundurthy, Sebastian Scherer, Howie Choset and Matthew Travers
Published: May 16, 2025
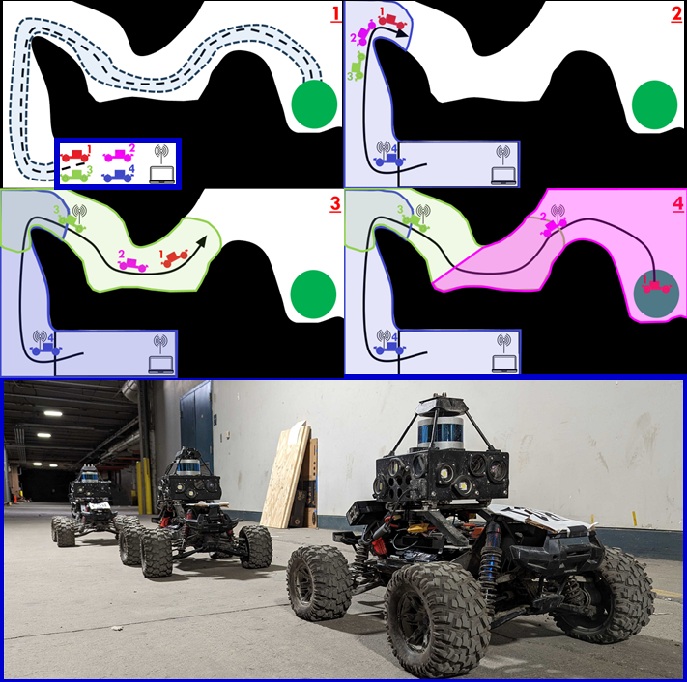
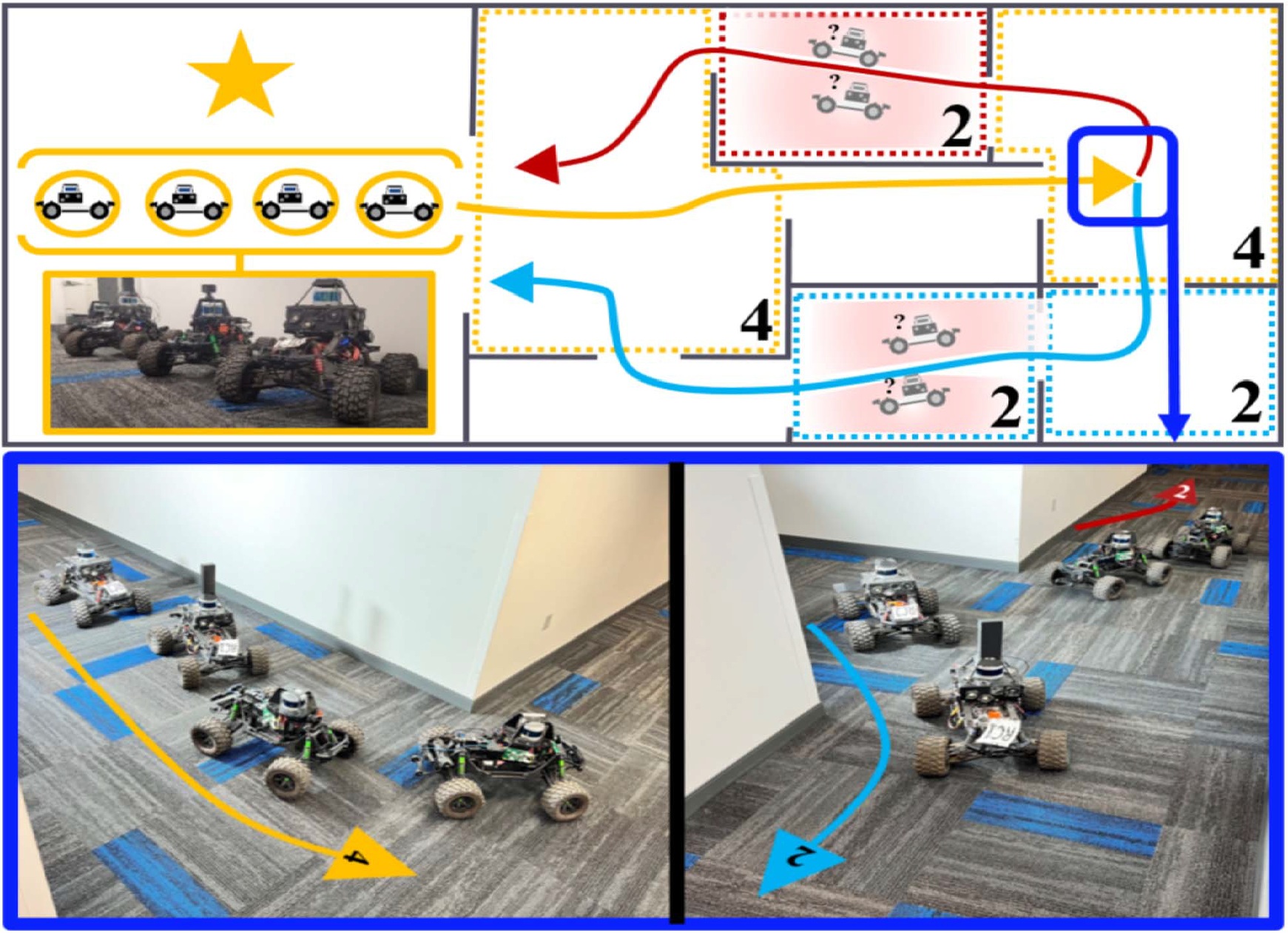
Future ground logistics missions will require multiple robots to travel in a convoy between locations. As each location may require a different number of robots (e.g. resupply vehicles), these missions will require a mutable convoy formation structure that may be divided to meet operational needs at each location. We model this mission type by modifying the vehicle routing problem with multiple synchronizations (VRPMS) to enforce convoy constraints (VRPMS-CC). This centralized approach to organizing and routing convoys is represented as a graph-based routing problem and then solved as a mixed integer program. A solution of the VRPMS-CC forms convoys by ensuring that agents participating in the same convoy remain spatially and temporally coupled, traversing the same edge of the graph simultaneously. We demonstrate our approach through numerical studies, where we route up to six simulated agents through twenty convoying tasks, and on robotic hardware. These demonstrations motivate two further contributions to specialize our approach to robotic systems. We introduce: 1) a warm-starting heuristic that improves solver times by up to eighty-nine percent and 2) an online multi-depot variant of the VRPMS-CC that responds to a priori unknown impassable environmental obstacles.
@article{noren2025synchronized,
title={A Synchronized Task Formulation for Robotic Convoy Operations},
author={Noren, Charles and Vundurthy, Bhaskar and Scherer, Sebastian and Choset, Howie and Travers, Matthew},
journal={IEEE Robotics and Automation Letters},
year={2025},
publisher={IEEE}
}
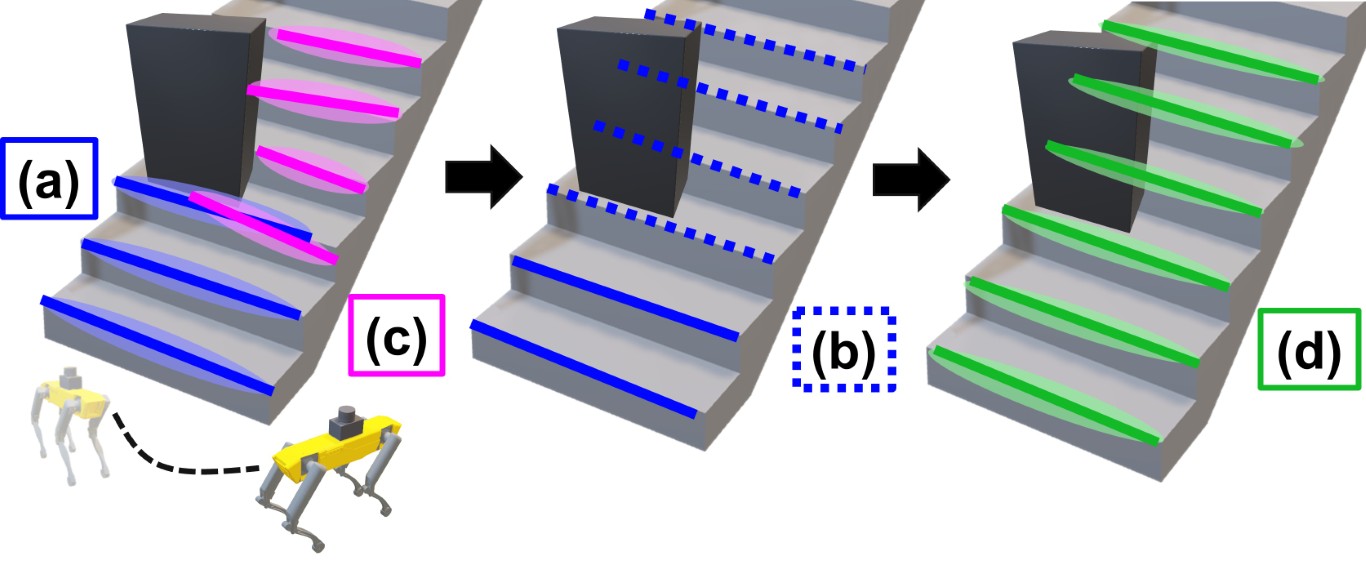
A Bayesian Modeling Framework for Estimation and Ground Segmentation of Cluttered Staircases
Prasanna Sriganesh, Burhanuddin Shirose and Matthew Travers
Published: March 10, 2025
Autonomous robot navigation in complex environments requires robust perception as well as high-level scene understanding due to perceptual challenges, such as occlusions, and uncertainty introduced by robot movement. For example, a robot climbing a cluttered staircase can misinterpret clutter as a step, misrepresenting the state and compromising safety. This requires robust state estimation methods capable of inferring the underlying structure of the environment even from incomplete sensor data. In this paper, we introduce a novel method for robust state estimation of staircases. To address the challenge of perceiving occluded staircases extending beyond the robot’s field-of-view, our approach combines an infinite-width staircase representation with a finite endpoint state to capture the overall staircase structure. This representation is integrated into a Bayesian inference framework to fuse noisy measurements enabling accurate estimation of staircase location even with partial observations and occlusions. Additionally, we present a segmentation algorithm that works in conjunction with the staircase estimation pipeline to accurately identify clutter-free regions on a staircase. Our method is extensively evaluated on real robot across diverse staircases, demonstrating significant improvements in estimation accuracy and segmentation performance compared to baseline approaches.
@article{sriganesh2025bayesian,
title={A Bayesian Modeling Framework for Estimation and Ground Segmentation of Cluttered Staircases},
author={Sriganesh, Prasanna and Shirose, Burhanuddin and Travers, Matthew},
journal={IEEE Robotics and Automation Letters},
year={2025},
volume={10},
number={5},
pages={4164-4171},
publisher={IEEE}
}
Zongyuan Shen, Burhanuddin Shirose, Prasanna Sriganesh and Matthew Travers
Published: March 1, 2025
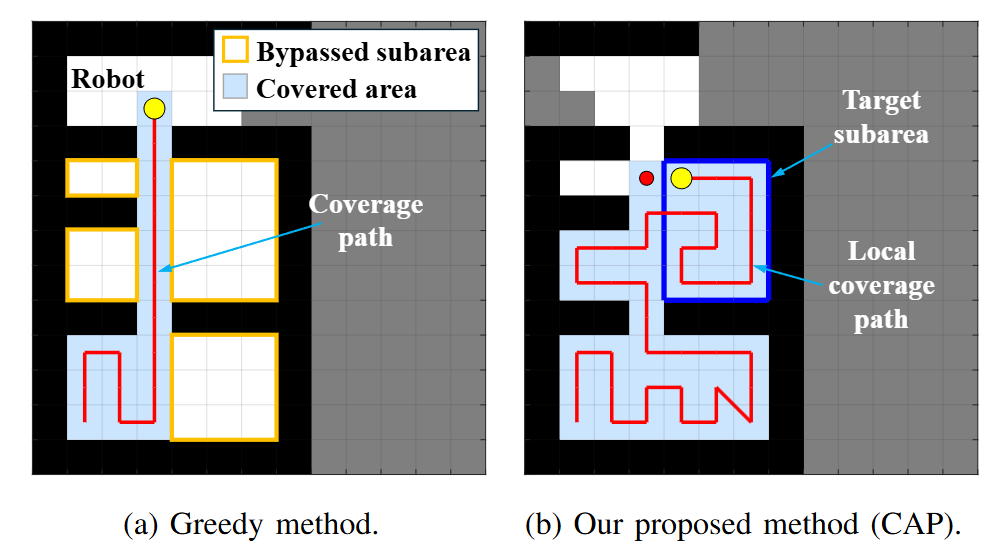
Efficient coverage of unknown environments requires robots to adapt their paths in real time based on on-board sensor data. In this paper, we introduce CAP, a connectivity-aware hierarchical coverage path planning algorithm for efficient coverage of unknown environments. During online operation, CAP incrementally constructs a coverage guidance graph to capture essential information about the environment. Based on the updated graph, the hierarchical planner determines an efficient path to maximize global coverage efficiency and minimize local coverage time. The performance of CAP is evaluated and compared with five baseline algorithms through high-fidelity simulations as well as robot experiments. Our results show that CAP yields significant improvements in coverage time, path length, and path overlap ratio
@inproceedings{shen2025cap,
title={CAP: A Connectivity-Aware Hierarchical Coverage Path Planning Algorithm for Unknown Environments using Coverage Guidance Graph},
author={Shen, Zongyuan and Shirose, Burhanuddin and Sriganesh, Prasanna and Travers, Matthew},
booktitle={2025 IEEE/RSJ International Conference on Intelligent Robots and Systems},
year={2025},
organization={IEEE}
}
2024
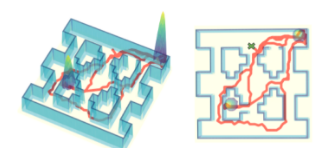
GESCE: Graph-based Ergodic Search in Cluttered Environments
Burhanuddin Shirose, Adam Johnson, Bhaskar Vundurthy, Howie Choset and Matthew Travers
Published: December 25, 2024
In this paper, we present a novel motion planning algorithm that inherits the strengths of both optimization and search-based planners. Optimization-based planners use the gradient of an objective function to generate a desired path, whereas search-based planners operate on a graph capturing the salient topology of a robot’s free space. A class of optimization-based planners leverages prior information, modeled as a probability distribution of target locations in an environment, to guide path generation. We embrace one specific measure, referred to as ergodicity, which encourages a robot to spend a proportion of its time, weighted by the distribution, where it is likely to find targets of interest. Methods that minimize ergodicity were not designed to handle obstacles in the environment, and augmented approaches that add “soft” constraints for obstacles to the cost function may still yield a path that collides with an obstacle. In this work, we present a hybrid approach that first generates a graph of the environment’s free space, followed by searching the graph with ergodicity as a heuristic. Our approach not only restricts the search to the free space, thereby avoiding obstacles by design, but also generates trajectories with low ergodicity values. Extensive testing on 125 test scenarios with varying degrees of clutter, information distribution, and robot start locations illustrate the efficacy of our algorithm.
@inproceedings{shirose24gesce,
author={Shirose, Burhanuddin and Johnson, Adam and Vundurthy, Bhaskar and Choset, Howie and Travers, Matthew},
booktitle={2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
title={GESCE: Graph-based Ergodic Search in Cluttered Environments},
year={2024},
volume={},
number={},
pages={7611-7616},
}
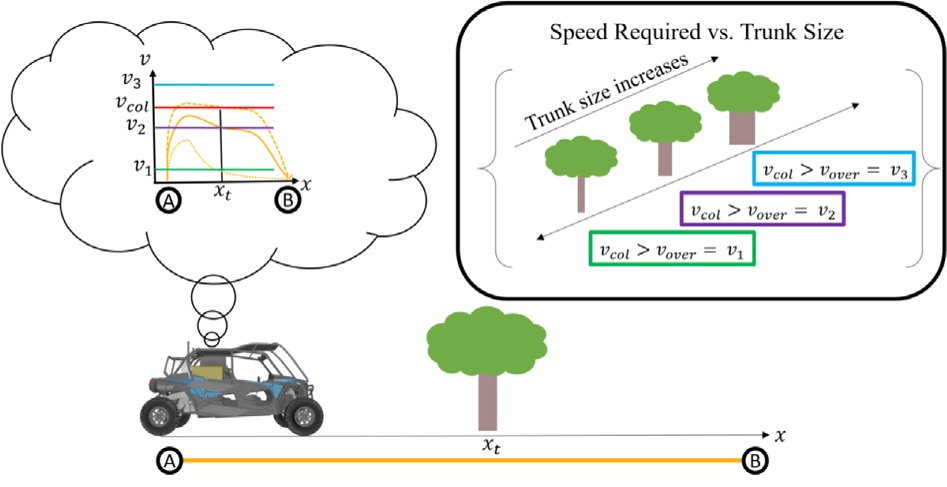
Interaction-aware control for robotic vegetation override in off-road environments
Charles Noren, Bhaskar Vundurthy, Sebastian Scherer and Matthew Travers
Published: November 29, 2024
Robotic systems tasked with completing off-road economic, military, or humanitarian missions often encounter environmental objects when traversing unstructured terrains. Certain objects (e.g. safety cones) must be avoided to ensure operational integrity, but others (e.g. small vegetation) can be interacted with (e.g. overridden/pushed) safely. Pure object-avoidance assumptions in conventional robotic system navigation policies may lead to inefficient (slow) or overly-cautious (immobilized) traversal behaviors in off-road terrains. To address this gap in system performance, we draw inspiration from existing hybrid dynamic system control literature. We have designed a nonlinear trajectory optimization controller that utilizes vegetation-interaction models as a jump map in the dynamics constraint. In contrast to purely vision-based navigation policies which classify the traversability of obstacles, the allowable subset of objects with which the vehicle can safely interact is now characterized by a data-driven collision model and the existence of a dynamically-feasible trajectory which satisfies the contact constraints. The controller’s capabilities are demonstrated on a full-sized autonomous utility task vehicle where objects including posts and trees of up to 25.4 [mm] and 81.8 [mm] diameter are overridden.
@article{noren2025interaction,
title={Interaction-aware control for robotic vegetation override in off-road environments},
author={Noren, Charles and Vundurthy, Bhaskar and Scherer, Sebastian and Travers, Matthew},
journal={Journal of Terramechanics},
volume={117},
pages={101034},
year={2025},
publisher={Elsevier}
}
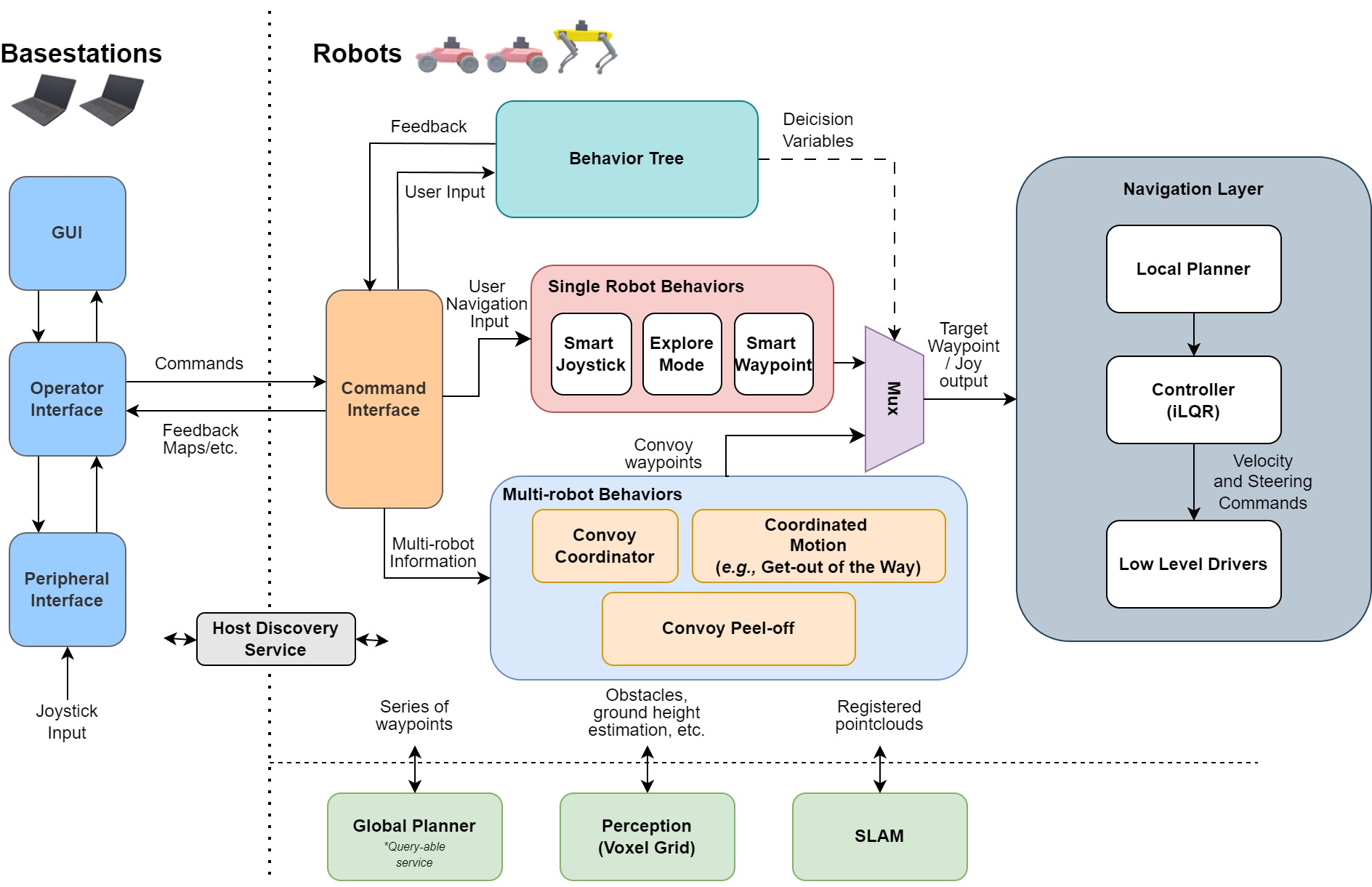
Prasanna Sriganesh, James Maier, Adam Johnson, Burhanuddin Shirose, Rohan Chandrasekar, Charles Noren, Joshua Spisak, Ryan Darnley, Bhaskar Vundurthy and Matthew Travers
Published: May 13, 2024
Field robotics applications, such as search and rescue, involve robots operating in large, unknown areas. These environments present unique challenges that compound the difficulties faced by a robot operator. The use of multi-robot teams, assisted by carefully designed autonomy, help reduce operator workload and allow the operator to effectively coordinate robot capabilities. In this work, we present a system architecture designed to optimize both robot autonomy and the operator experience in multi-robot scenarios. Drawing on lessons learned from our team’s participation in the DARPA SubT Challenge, our architecture emphasizes modularity and interoperability. We empower the operator by allowing for adjustable levels of autonomy (“sliding mode autonomy”). We enhance the operator experience by using intuitive, adaptive interfaces that suggest context-aware actions to simplify control. Finally, we describe how the proposed architecture enables streamlined development of new capabilities for effective deployment of robot autonomy in the field.
@inproceedings{sriganesh2024systemdesign,
title={Modular, Resilient, and Scalable System Design Approaches - Lessons learned in the years after {DARPA} Subterranean Challenge},
author={Prasanna Sriganesh and James Maier and Adam Johnson and Burhanuddin Shirose and Rohan Chandrasekar and Charles Noren and Joshua Spisak and Ryan Darnley and Bhaskar Vundurthy and Matthew Travers},
booktitle="IEEE ICRA Workshop on Field Robotics",
year={2024}
}
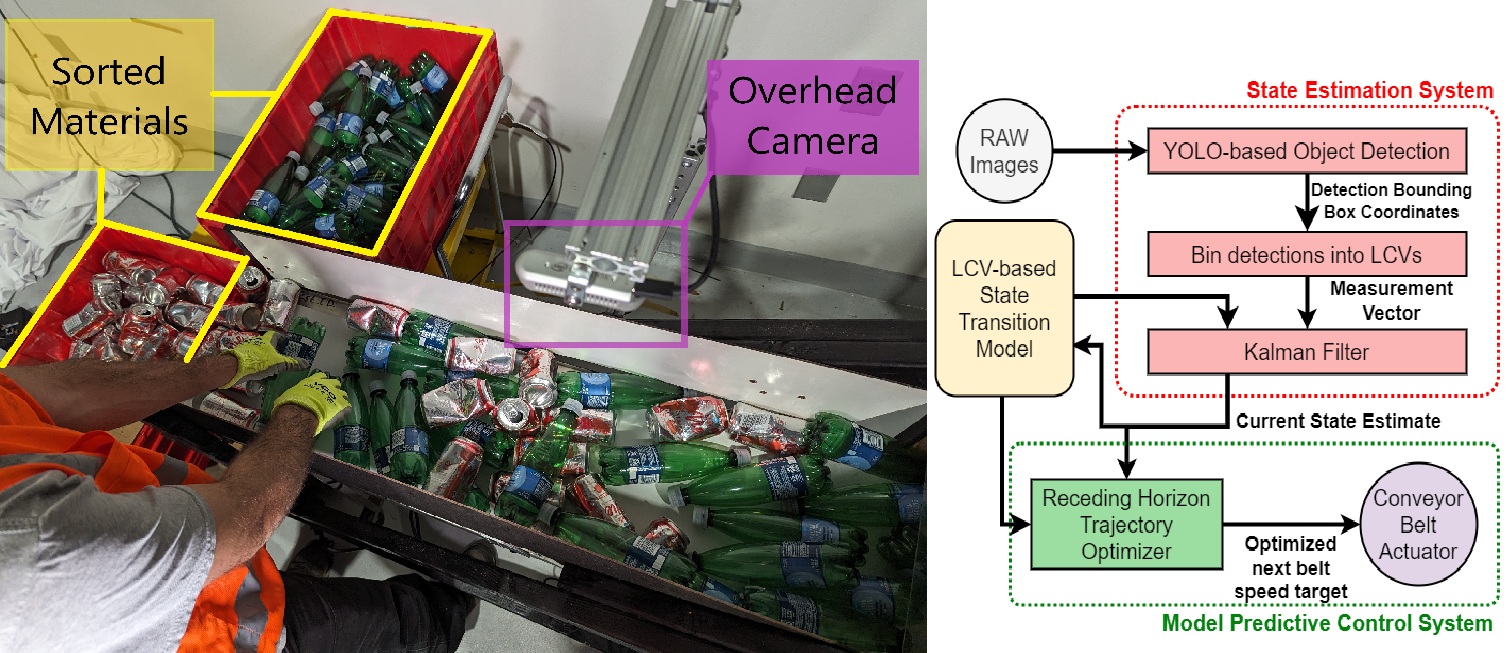
James Maier, Prasanna Sriganesh and Matthew Travers
Published: May 13, 2024
Centralized control of a multi-agent system improves upon distributed control especially when multiple agents share a common task e.g., sorting different materials in a recycling facility. Traditionally, each agent in a sorting facility is tuned individually which leads to suboptimal performance if one agent is less efficient than the others. Centralized control overcomes this bottleneck by leveraging global system state information, but it can be computationally expensive. In this work, we propose a novel framework called Longitudinal Control Volumes (LCV) to model the flow of material in a recycling facility. We then employ a Kalman Filter that incorporates local measurements of materials into a global estimation of the material flow in the system. We utilize a model predictive control algorithm that optimizes the rate of material flow using the global state estimate in real-time. We show that our proposed framework outperforms distributed control methods by 40-100% in simulation and physical experiments.
@inproceedings{maier2024longitudinal,
title={Longitudinal Control Volumes: A Novel Centralized Estimation and Control Framework for Distributed Multi-Agent Sorting System},
author={Maier, James and Sriganesh, Prasanna and Travers, Matthew},
booktitle={2024 IEEE International Conference on Robotics and Automation (ICRA)},
pages={4420--44279},
year={2024},
organization={IEEE},
}
2023

Distributed Optimal Control Framework for High-Speed Convoys: Theory and Hardware Results
Namya Bagree, Charles Noren, Damanpreet Singh, Matthew Travers and Bhaskar Vundurthy
Published: July 9, 2023
Practical deployments of coordinated fleets of mobile robots in different environments have revealed the benefits of maintaining small distances between robots, especially as they move at higher speeds. However, this is counter-intuitive in that as speed increases, reducing the amount of space between robots also reduces the time available to the robots to respond to sudden motion variations in surrounding robots. However, in certain examples, the benefits in performance due to traveling at closer distances can outweigh the potential instability issues, for instance, autonomous trucks on highways that optimize energy by vehicle “drafting” or smaller robots in cluttered environments that need to maintain close, line of sight communication, etc. To achieve this kind of closely coordinated fleet behavior, this work introduces a model predictive optimal control framework that directly takes non-linear dynamics of the vehicles in the fleet into account while planning motions for each robot. The robots are able to follow each other closely at high speeds by proactively making predictions and reactively biasing their responses based on state information from the adjacent robots. This control framework is naturally decentralized and, as such, is able to apply to an arbitrary number of robots without any additional computational burden. We show that our approach is able to achieve lower inter-robot distances at higher speeds compared to existing controllers. We demonstrate the success of our approach through simulated and hardware results on mobile ground robots.
@article{bagree2023distributed,
title={Distributed optimal control framework for high-speed convoys: Theory and hardware results},
author={Bagree, Namya and Noren, Charles and Singh, Damanpreet and Travers, Matthew and Vundurthy, Bhaskar},
journal={IFAC-PapersOnLine},
volume={56},
number={2},
pages={2127--2133},
year={2023},
publisher={Elsevier}
}
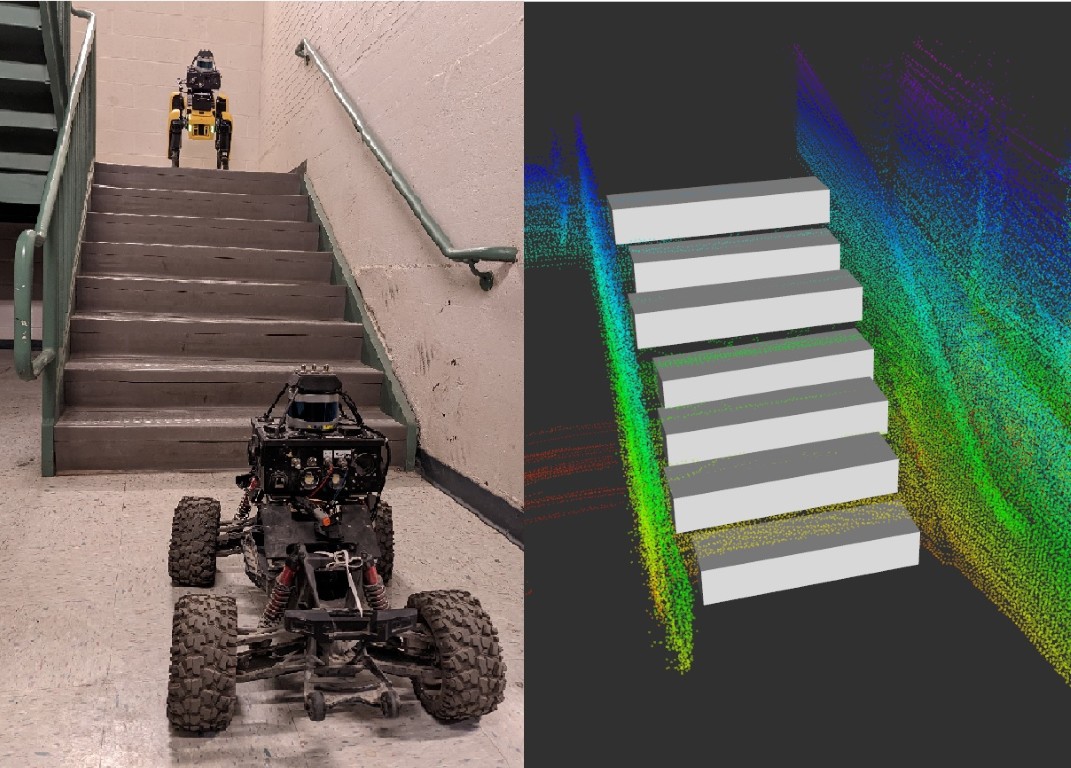
Prasanna Sriganesh, Namya Bagree, Bhaskar Vundurthy and Matthew Travers
Published: June 1, 2023
Robotic systems need advanced mobility capabili-ties to operate in complex, three-dimensional environments designed for human use, e.g., multi-level buildings. Incorporating some level of autonomy enables robots to operate robustly, reliably, and efficiently in such complex environments, e.g., automatically "returning home" if communication between an operator and robot is lost during deployment. This work presents a novel method that enables mobile robots to robustly operate in multi-level environments by making it possible to autonomously locate and climb a range of different staircases. We present results wherein a wheeled robot works together with a quadrupedal system to quickly detect different staircases and reliably climb them. The performance of this novel staircase detection algorithm that is able to run on the heterogeneous platforms is compared to the current state-of-the-art detection algorithm. We show that our approach significantly increases the accuracy and speed at which detections occur.
@inproceedings{sriganesh2023fast,
title={Fast Staircase Detection and Estimation using 3D Point Clouds with Multi-detection Merging for Heterogeneous Robots},
author={Sriganesh, Prasanna and Bagree, Namya and Vundurthy, Bhaskar and Travers, Matthew},
booktitle={2023 IEEE International Conference on Robotics and Automation (ICRA)},
pages={9253--9259},
year={2023},
organization={IEEE},
}